micro:bit Basket:bot
I designed this project for a special Code Club event at the Clippers basketball arena (follow this link to see a short video summary of the event). These bots are …
Tech-Based Activities for Grownups and Kids
I designed this project for a special Code Club event at the Clippers basketball arena (follow this link to see a short video summary of the event). These bots are …
The behind-the-neck battery holder design continues to evolve from its initial laser-cut form, to a 3D printed PLA design, to the latest, flexible filament-based version described here. This revision feels …
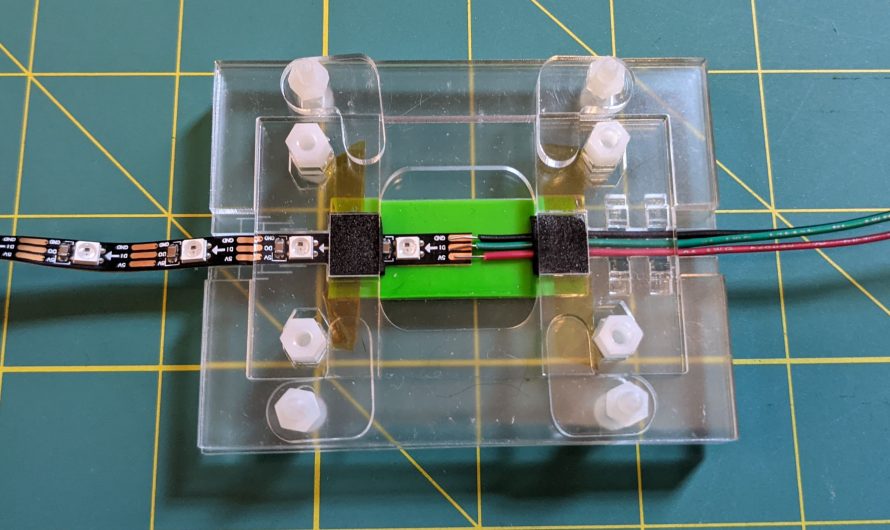
This build was inspired by a teacher whose students were having difficulty soldering “skinny” led strips for their projects. The adjustable jig is designed to hold various sizes of LED …
After a long period without a working 3D printer I just got a Prusa MINI+, opening up a wide new range of potential projects. In particular, I finally am able …
As the name says, Carrie from AlpenGlow Industries and I will be having a live, Build-a-Blob making session on Wednesday, Oct. 13 at her YouTube Channel. See our blog posts …
The cute creatures shown above are spheroids comprised of nothing more than bent LED string lights and zip ties. The LED Blob is a simple, silly project that’s enjoyable to …
Many of my smaller wearable projects don’t have space for batteries near the electronics, so the power source is often housed in a separate holder. In particular, I’ve found that …
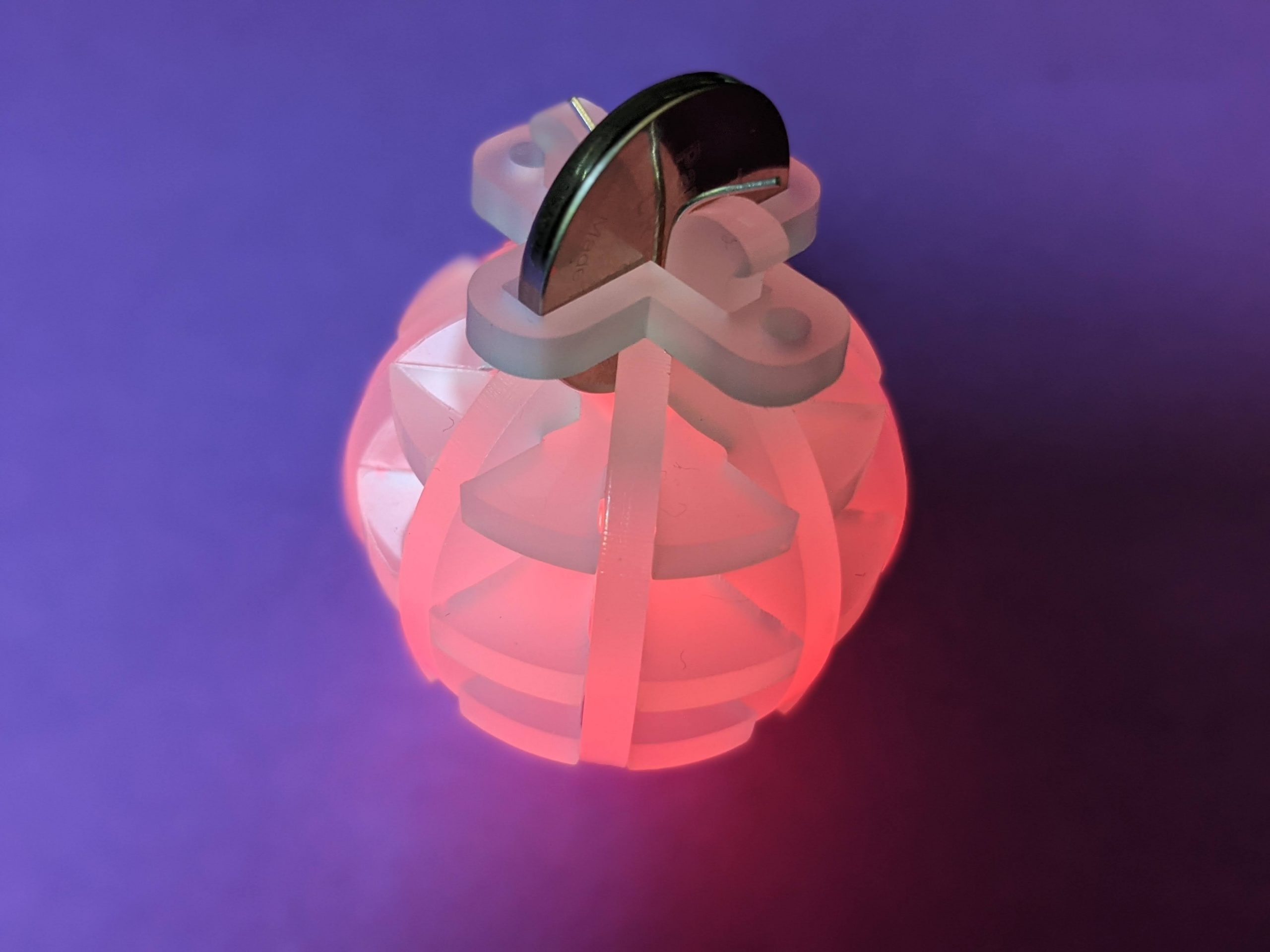
This project assembles small laser-cut acrylic pieces into a sphere surrounding a 5mm LED for edge-lighting which emanates from the center. I designed it a while ago, but was never …
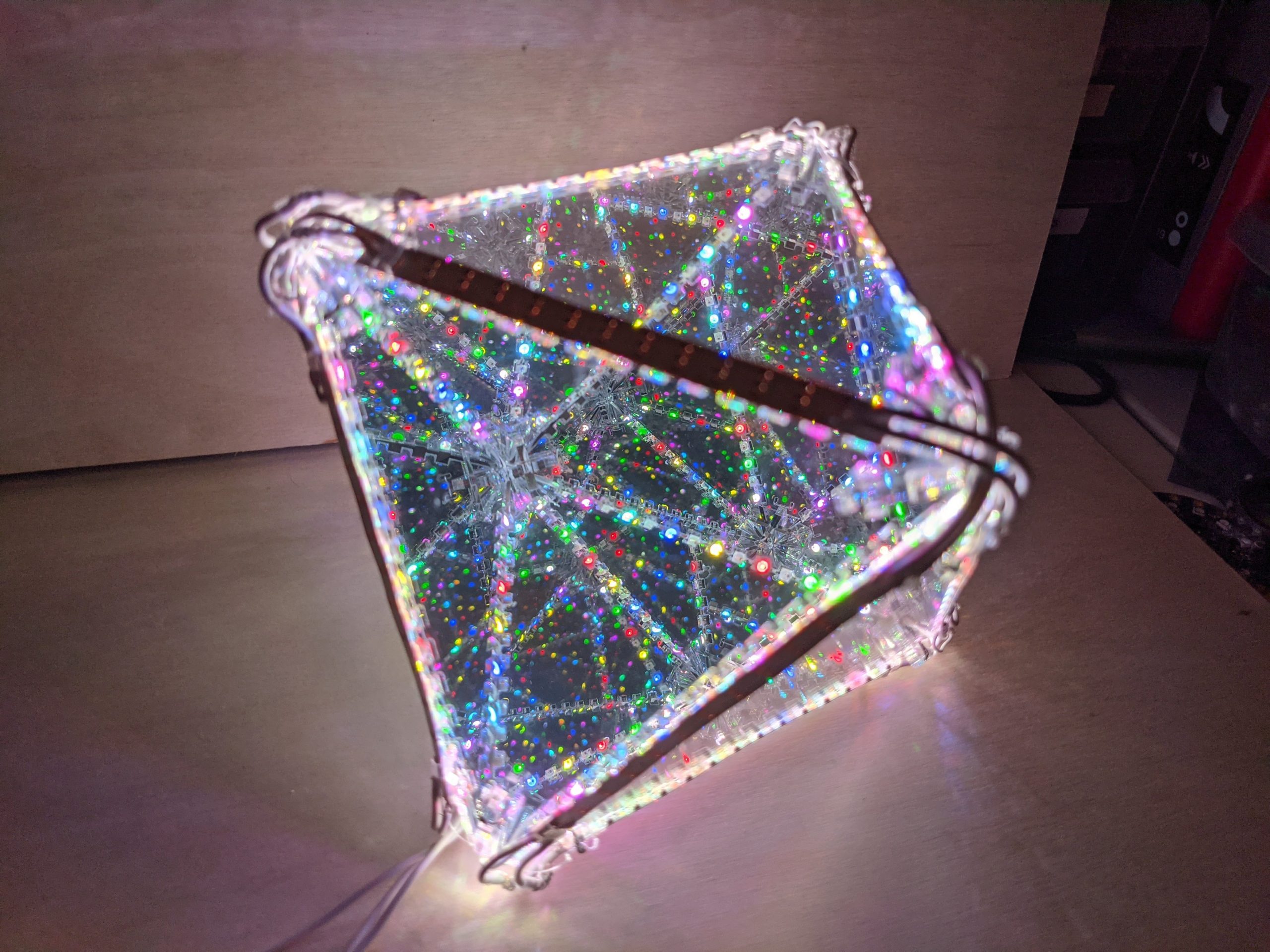
I’ve been having a lot of fun with infinity mirrors, and recently built an infinity octahedron from laser-cut partially mirrored acrylic. An octahedron makes a particularly nice base for an …
Infinity mirrors display endless reflections of light inside a finite space. Sandwiching a fairy light string’s LEDs between semi-reflective acrylic layers produces an inexpensive and sturdy infinity mirror for a …