New IMU Library for Arduino- RTIMULib
My blog traffic shows that a lot of the visitors are looking for information on IMUs (Inertial Measurement Units) like the MPU-6050. Understanding how to use IMUs and access the data …
Tech-Based Activities for Grownups and Kids
My blog traffic shows that a lot of the visitors are looking for information on IMUs (Inertial Measurement Units) like the MPU-6050. Understanding how to use IMUs and access the data …
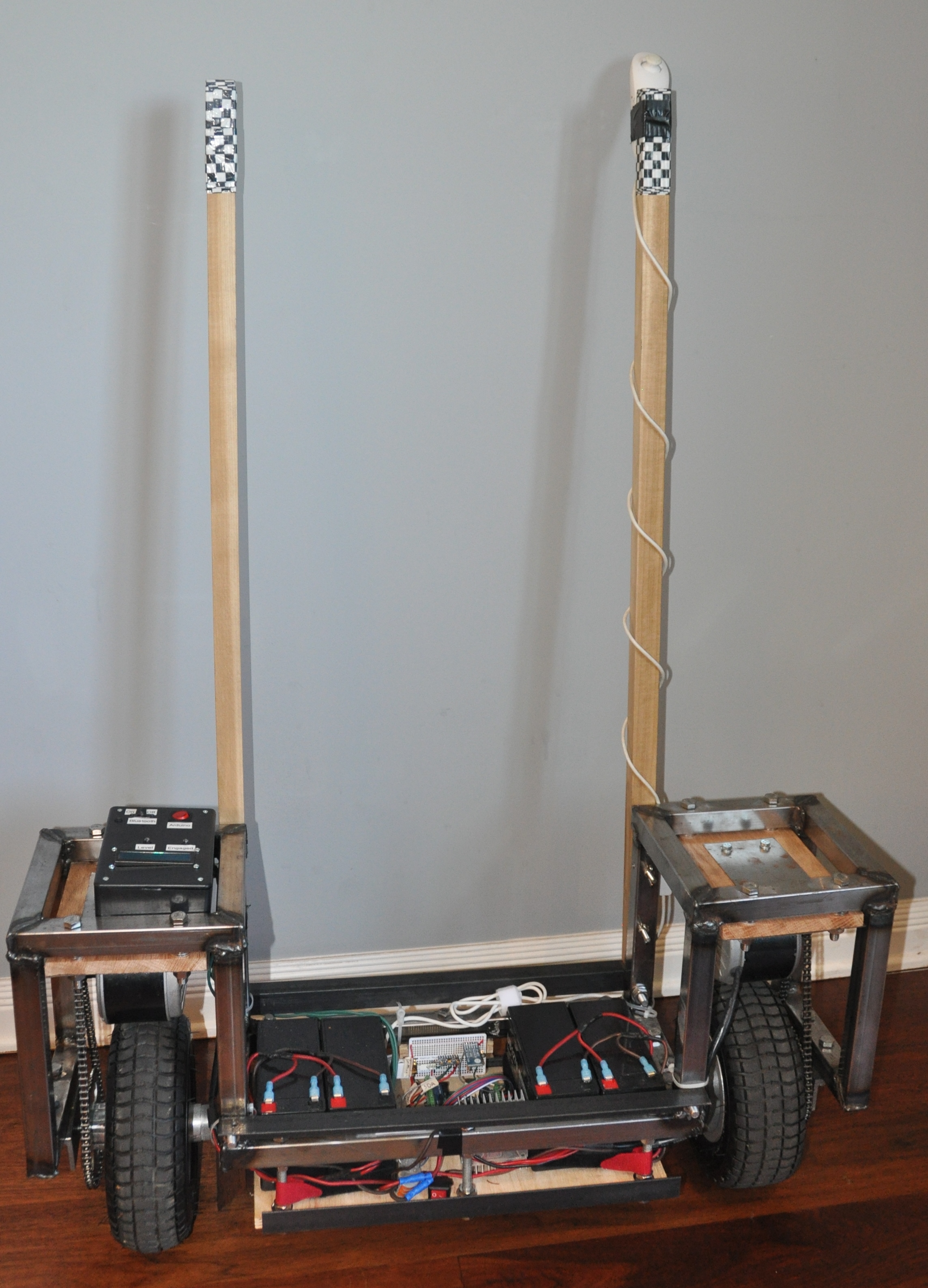
I’ve been using the GY-521 IMU breakout board containing Invensense’s MPU-6050 IMU to compute orientation in my self-balancing scooter (the “Halfway”). I’d like to improve the scooter’s performance on hills and …
This latest project is the longest and most complicated so far. Over the last several months I’ve been working to put together a Segway-like self-balancing scooter, aka the “Halfway”. Many …
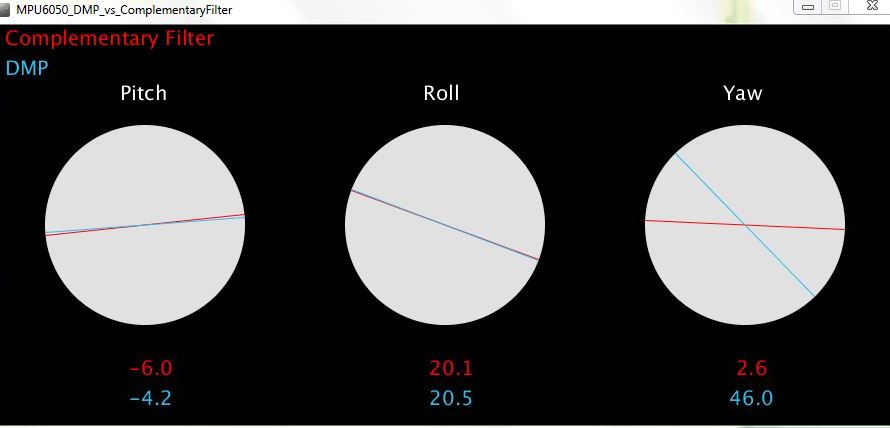
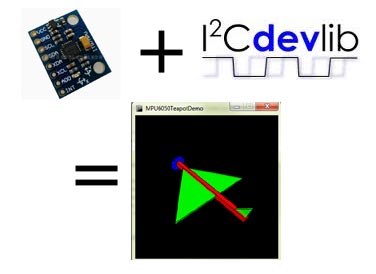
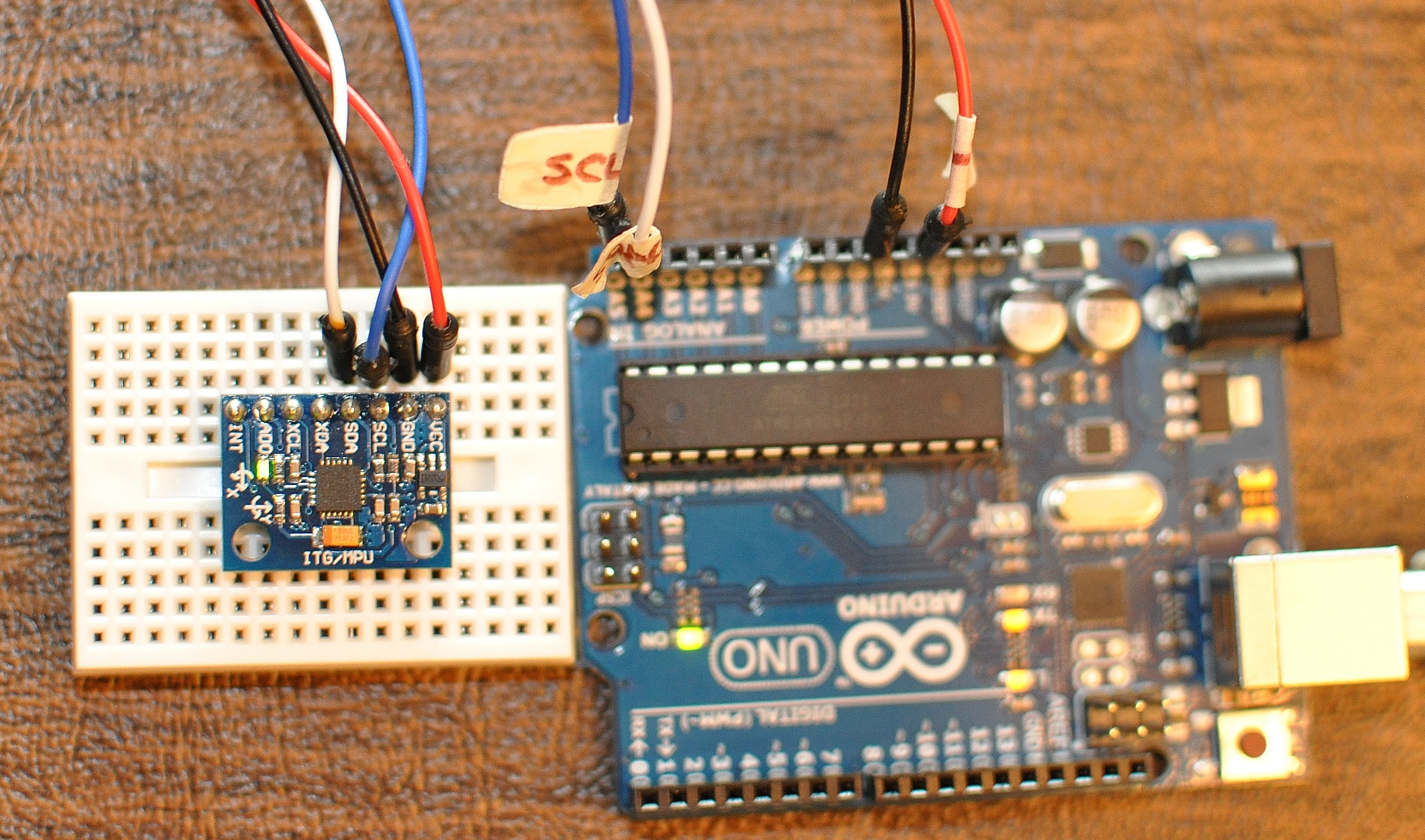
In March, I posted on experimenting with the MPU-6050 IMU chip (mounted in a GY-521 breakout board). It seems that many people are using the MPU-6050, and I wanted to …
My last two blog entries discussed demonstrations of gyroscopes and angular momentum conservation at our school’s science fair. One of the demonstrations I put together takes a look at how …
As I mentioned in my last post, my sons’ school had a science fair last week where I ran a demonstration involving angular momentum and gyroscopes. In researching the use of …
Last weekend my children’s school had a science fair which they called “STEAM Day”, for Science, Technology, Engineering, Arts and Math. It turned out to be a engaging and dynamic …