MPU-6050 Redux: DMP Data Fusion vs. Complementary Filter
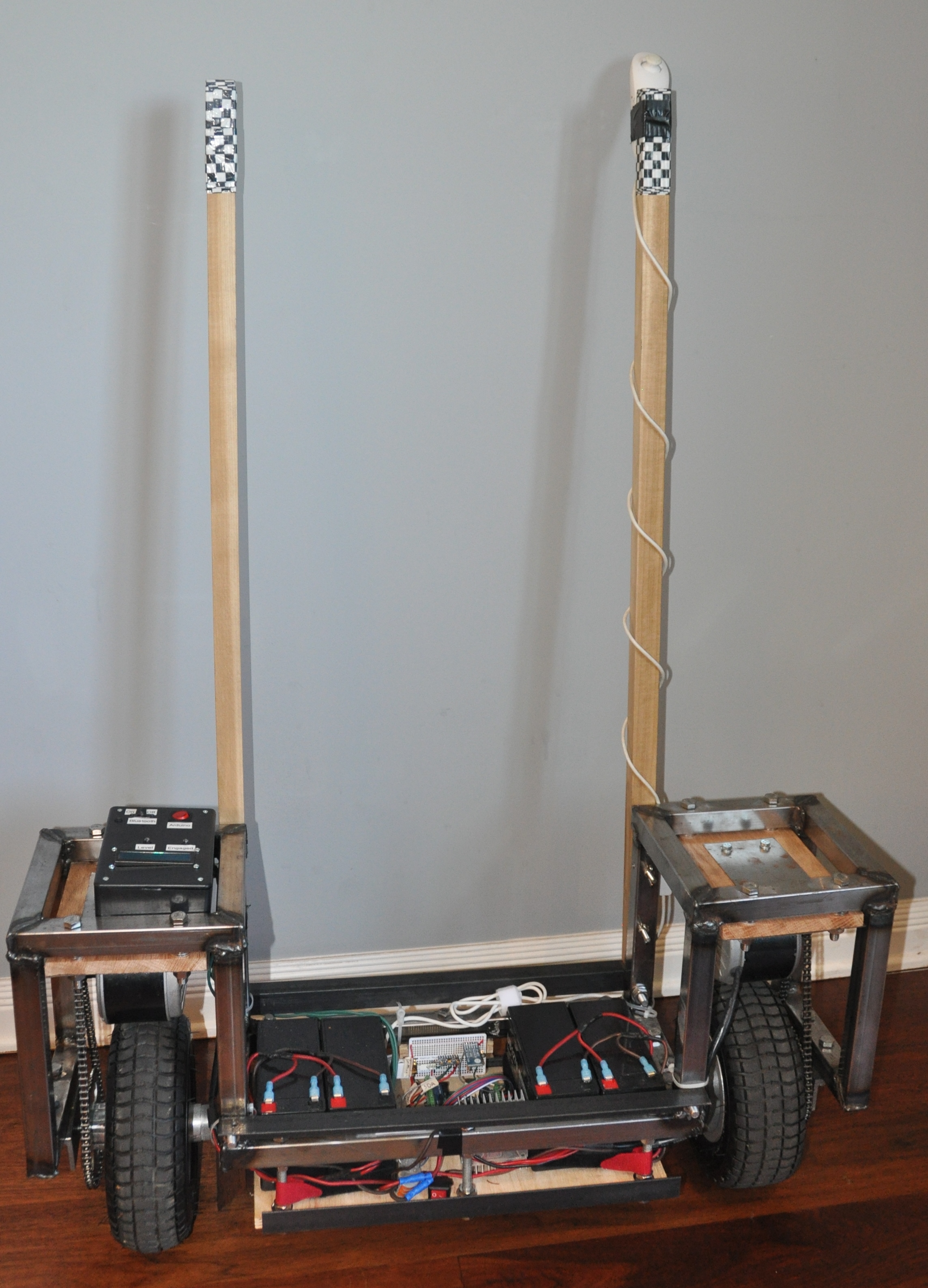
I’ve been using the GY-521 IMU breakout board containing Invensense’s MPU-6050 IMU to compute orientation in my self-balancing scooter (the “Halfway”). I’d like to improve the scooter’s performance on hills and …